步態(tài)分析系統(tǒng)����,18618101725(微信同),QQ:736597338 ,信箱slby800@163.com
一站式3D動(dòng)作捕捉分析系統(tǒng)
之可神經(jīng)調(diào)控的步態(tài)動(dòng)作捕捉分析
靈活性
數(shù)據(jù)分析
自主步行
三�����、步態(tài)報(bào)告:提供一鍵生成標(biāo)準(zhǔn)化步態(tài)報(bào)告的能力���。
靈活性
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速�、簡(jiǎn)單和準(zhǔn)確的設(shè)置�����。 使用 Bell�、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心。
記錄
使用測(cè)力臺(tái)撞擊或腳踏開關(guān)等事件作為觸發(fā)��,免提記錄單次或多次試驗(yàn)����。 查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤����。
數(shù)據(jù)分析
自主步行
使用 Bertec 的儀表跑步機(jī)��,動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行�。 捕獲和分析每一步的動(dòng)力學(xué)數(shù)據(jù)。
步態(tài)再訓(xùn)練
跟蹤體外或體內(nèi)動(dòng)態(tài)運(yùn)動(dòng)期間的骨相互作用�����。
使用特定于主題的骨骼文件和幾何圖形擴(kuò)充標(biāo)準(zhǔn)運(yùn)動(dòng)學(xué)數(shù)據(jù)�����。
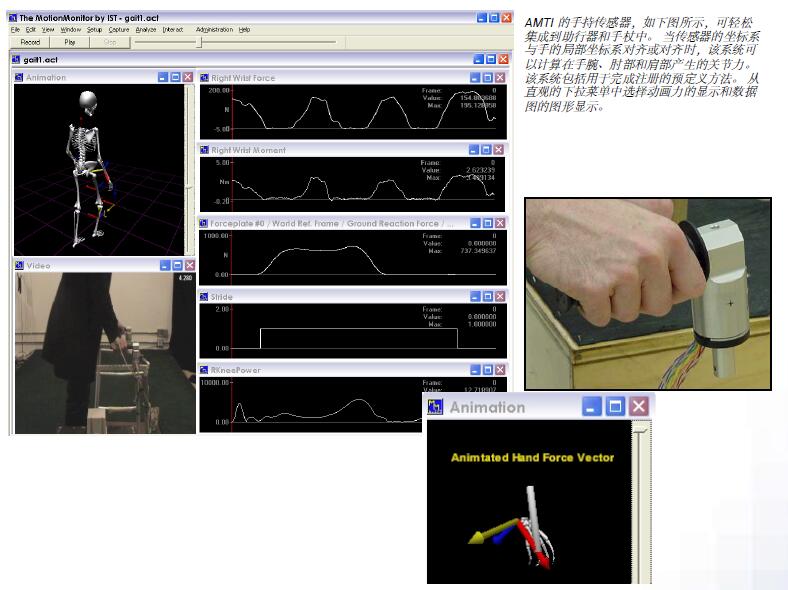
五���、步態(tài)與上肢分析(Gait with Upper Extremity Analysis)
● 將 AMTI 的儀器步行器和手杖納入步態(tài)分析���。
●使用簡(jiǎn)單的下拉菜單輸出包括上肢關(guān)節(jié)力矩和力在內(nèi)的所有運(yùn)動(dòng)學(xué)數(shù)據(jù)。
●將傳感器力和力矩與手的局部坐標(biāo)系注冊(cè)并對(duì)齊��。
●使用測(cè)力板沖擊或腳踏開關(guān)觸發(fā)數(shù)據(jù)采集��,免提采集。
●按體重����、身高、步態(tài)周期百分比和步幅對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化�。
●自動(dòng)集成平均輸出數(shù)據(jù)�����。 顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖���。
●創(chuàng)建用戶參數(shù)化數(shù)據(jù)庫��,用于主題數(shù)據(jù)的比較分析����。
章 基礎(chǔ)知識(shí)
所有自主運(yùn)動(dòng)��,比如行走���,都是由大腦��、脊髓��、周圍神經(jīng)��、肌肉����、骨骼和關(guān)節(jié)的復(fù)雜過程產(chǎn)生的。在考慮行走過程的詳細(xì)內(nèi)容(如可能的問題和如何研究)之前���,讀者有必要對(duì)三個(gè)學(xué)科有一些基礎(chǔ)的了解:解剖學(xué)�、生理學(xué)和生物力學(xué)��。本章將為那些不熟悉這些主題的人提供這些課程的基礎(chǔ)知識(shí)����,并將為那些有相關(guān)基礎(chǔ)知識(shí)的讀者提供一個(gè)方便的參考資料。
解剖學(xué)
本書的目的不是要詳細(xì)講授運(yùn)動(dòng)系統(tǒng)的解剖結(jié)構(gòu)��,這在其他基本書里有很好的闡述(如 Palastanga 等人���,1989)�。雖然下面的內(nèi)容僅給出了這個(gè)主題的概述�,但應(yīng)該足以用來理解步態(tài)分析。不同的教科書對(duì)身體不同部位的解剖名稱有所不同���,這里盡可能使用常用的名稱�����。本節(jié)首先介紹一些基本的解剖學(xué)術(shù)語�����,然后再描述骨骼����、關(guān)節(jié)�、肌肉和神經(jīng)系統(tǒng)。 盡管動(dòng)脈和靜脈對(duì)運(yùn)動(dòng)系統(tǒng)來說是必不可少的���,但它們通常只是間接的影響步態(tài)過程��,所以我在這里不會(huì)去描述�。
解剖學(xué)基本術(shù)語
描述人體不同位置的解剖學(xué)術(shù)語是基于解剖學(xué)姿態(tài)(anatomical position)����。其中人要站直,兩腳平行���,雙臂置于身體兩側(cè)��,手心向前�����。這種解剖學(xué)姿態(tài)���,和參考面以及描述不同部分和身體間關(guān)系的術(shù)語����,如圖1.1 所示����。

六個(gè)術(shù)語用來描述以身體為中心的方向,這里舉例說明:
-
肚臍在前方(anterior)
-
臀部在后方(posterior)
-
頭在上方(superior)
-
腳在下方(inferior)
-
左側(cè)是自明的
-
右側(cè)也一樣
身體的前表面是腹部�����,后表面是背部����。背部一詞也用來描述手背和腳的上表面。術(shù)語頭向(cephalad����,朝向頭部)和尾向(caudad����,朝向尾部)有事用來代替上方和下方����。
另外還有六個(gè)術(shù)語用來描述身體單獨(dú)部分的關(guān)系:
-
內(nèi)側(cè)(medial)表示朝向身體中線:大腳趾位于腳的內(nèi)側(cè)
-
外側(cè)(lateral)表示遠(yuǎn)離身體中線:小腳趾位于腳的外側(cè)
-
近端(proximal)表示朝向身體的其他部分:肩膀在手臂的近端
-
末端(diatal)表示原理身體的其他部分:手指在手的末端
-
表層結(jié)構(gòu)(superficial structures)指靠近表面
-
深層結(jié)構(gòu)(deep structures)指遠(yuǎn)離表面
肢體的運(yùn)動(dòng)可以用參考平面來描述:
-
矢狀面(sagittal plane)是將身體分為左右兩部分的平面;中間平面(median plane)是中線所在的矢狀面���,它將身體分為左右兩半
-
前視面(frontal plane)將身體分為前后兩個(gè)部分
-
橫截面(transverse plane)將身體分為上下兩個(gè)部分
術(shù)語冠狀面(coronal plane)等于前視面��。橫截面也被稱為水平面,盡管只有在站立狀態(tài)它才是水平的�。

圖 1.2 髖關(guān)節(jié)和膝關(guān)節(jié)的運(yùn)動(dòng)

圖 1.3 踝關(guān)節(jié)、腳趾�����、前足和后足的運(yùn)動(dòng)
多數(shù)的關(guān)節(jié)只能在這三個(gè)參考面的一個(gè)或兩個(gè)中運(yùn)動(dòng)���,髖關(guān)節(jié)和膝關(guān)節(jié)的運(yùn)動(dòng)方向如圖1.2所示���,踝關(guān)節(jié)如圖1.3所示�?���?赡艿倪\(yùn)動(dòng)如下:
-
彎曲(flexion)和伸展(extension)發(fā)生在矢狀面;在腳踝處它們分別被稱為背屈(dorsiflexion)和跖屈(plantarflexion)
-
外展(abduction)和內(nèi)收(adduction)發(fā)生在前視面
-
內(nèi)轉(zhuǎn)(internal rotation)和外內(nèi)轉(zhuǎn)(external rotation)發(fā)生在橫截面�����;前表面的旋轉(zhuǎn)分別用內(nèi)轉(zhuǎn)(medial rotation)和外轉(zhuǎn)(lateral rotation)�����。
其他用來描述關(guān)節(jié)和肢體運(yùn)動(dòng)的術(shù)語如下:
-
內(nèi)翻(varus)和外翻(valgus)用來描述關(guān)節(jié)靠近和遠(yuǎn)離中線的回轉(zhuǎn)角度�;膝外翻(X形腿 )為內(nèi)翻,弓形腿(O形腿)為外翻
-
旋前(pronation)和旋后(supination)是圍繞前臂或腳的長(zhǎng)軸的旋轉(zhuǎn)��;雙手旋前使得拇指靠攏�����,旋后使得小指靠攏���。
-
內(nèi)翻(inversion)和外翻(eversion)�����,內(nèi)翻使得腳底靠近���,外翻使得腳底遠(yuǎn)離中線�����。
腳部的術(shù)語缺少標(biāo)準(zhǔn)化����,所以經(jīng)常令人感到非常困惑���。在本書中采用為常見的慣例(如圖1.3所示)�,其中術(shù)語旋前主要用于外翻�����、背屈和前足外展組合而成的運(yùn)動(dòng)���;同樣,旋后主要是內(nèi)翻�,同時(shí)也帶有一點(diǎn)跖屈和內(nèi)收。這些運(yùn)動(dòng)代表了前腳相對(duì)于后腳的“扭曲”���。然而�����,也有一些作者將旋前和旋后認(rèn)為是基本運(yùn)動(dòng)�����,內(nèi)翻和外翻為組合運(yùn)動(dòng)��。