3D運(yùn)動(dòng)實(shí)時(shí)捕捉分析系統(tǒng)�,18618101725(微信同),QQ:736597338 ,信箱slby800@163.com
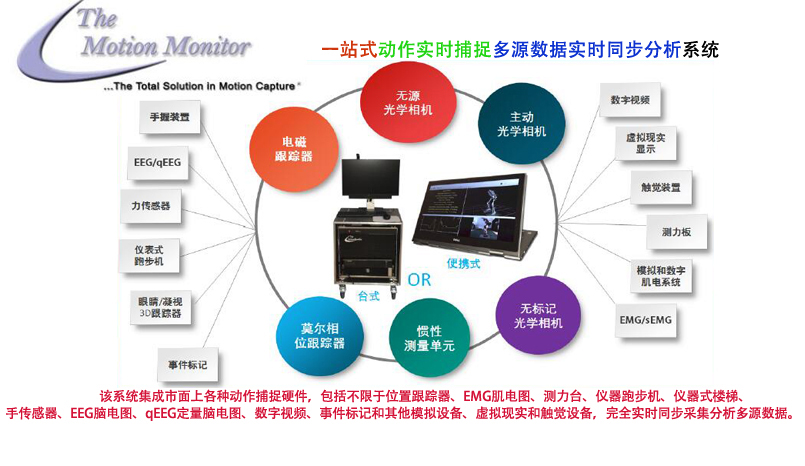
支持各種捕捉技術(shù):確保技術(shù)性價(jià)比
支持各種外圍設(shè)備:實(shí)現(xiàn)人體動(dòng)作捕捉分析所有方面
我們幫助您選擇并集成外圍系統(tǒng)�����,確保實(shí)現(xiàn)您獨(dú)特的目標(biāo)���。
各種捕捉相機(jī)����、位置跟蹤器���、EMG(肌電圖)����、測(cè)力臺(tái)、儀器式跑步機(jī)���、儀器式樓梯����、手傳感器�����、EEG腦電圖�����、定量腦電圖(quantitative EEG,qEEG)系統(tǒng)���、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備�、虛擬現(xiàn)實(shí)和觸覺設(shè)備等等。
一站交鑰匙式服務(wù):避免處理多個(gè)供應(yīng)商的麻煩�����,MotionMmonitor支持團(tuán)隊(duì)一鍵式呼叫將解決硬件和軟件相關(guān)問題:
典型應(yīng)用簡(jiǎn)介:
MotionMonitor在涉及人體運(yùn)動(dòng)研究的廣泛應(yīng)用中提供實(shí)時(shí)解決方案。旨在分析人體運(yùn)動(dòng)的所有方面���,從可能影響人體運(yùn)動(dòng)的外部刺激開始�;響應(yīng)該模擬的大腦活動(dòng)的測(cè)量和可視化�����;然后測(cè)量和分析影響運(yùn)動(dòng)所需的肌肉募集�;報(bào)告標(biāo)準(zhǔn)運(yùn)動(dòng) 學(xué)和由此產(chǎn)生的聯(lián)合力。刺激以各種格式進(jìn)行監(jiān)控���,從一維目標(biāo)到在WorldViz和Unity中創(chuàng)建的3D沉浸式虛擬�。視覺刺激呈現(xiàn)在簡(jiǎn)單的平面屏幕����、頭戴式顯示器、立體投影屏幕和的Bertec沉浸式穹頂上�。大腦活動(dòng)從 3 個(gè)不同的 EEG 系 統(tǒng)同步捕獲,提供輕松識(shí)別事件和關(guān)聯(lián)運(yùn)動(dòng)的能力��。所有的 EMG 系統(tǒng)都對(duì)肌肉募集進(jìn)行了物理測(cè)量。此外�����,可以使用具有用戶定義的優(yōu)化程序的集成肌肉模型對(duì)單個(gè)肌肉活動(dòng)進(jìn)行建模�����。反向動(dòng)力學(xué)來自 10 個(gè)不同的動(dòng)作捕捉系統(tǒng)和所有的測(cè)力臺(tái)生產(chǎn)商收集的數(shù)據(jù)����。 軟件在用于捕獲數(shù)據(jù)的技術(shù)的廣度和它所包含的分析深度方面。
1����、生物力學(xué)與生命科學(xué)
我們的方案裝置支持從骨科到運(yùn)動(dòng)機(jī)能學(xué)、運(yùn)動(dòng)科學(xué)����、運(yùn)動(dòng)訓(xùn)練�、力量與調(diào)節(jié)和運(yùn)動(dòng)醫(yī)學(xué)的生命科學(xué)研究。功能包括:
多種可視化方法��,以有效的方式顯示您需要的數(shù)據(jù)���,包括文本�����;條形圖或時(shí)間序列圖���;動(dòng)畫��;或 3D 可視化����。
無需編程即可從下拉菜單中獲取原始和處理過的數(shù)據(jù)��,例如運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)���。用戶定義的公式和腳本允許對(duì)步態(tài)分析�、平衡�、伸手和抓握等進(jìn)行特定于應(yīng)用程序的分析。
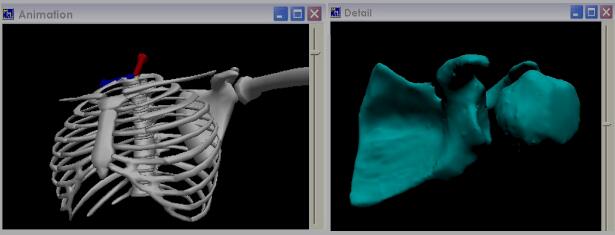
各種生物力學(xué)建模功能���,包括自定義關(guān)節(jié)中心定義和局部坐標(biāo)系的能力�。支持標(biāo)準(zhǔn)方法�,例如國(guó)際生物力學(xué)協(xié)會(huì) (ISB) 的建議和用戶定義的模型。可以跟蹤�、分析和可視化手、足和脊柱的各個(gè)骨骼�。
CT-MRI 配準(zhǔn),用于創(chuàng)建具有特定主題骨骼幾何形狀的 3D 渲染�。解剖標(biāo)志可以從掃描中自動(dòng)提取并用于定義生物力學(xué)模型。
集成肌肉建模��,使用用戶定義或?qū)氲?OpenSim 模型�,直接從運(yùn)動(dòng)捕捉數(shù)據(jù)中可視化和分析肌肉力和力矩。
支持多種運(yùn)動(dòng)捕捉技術(shù)�,包括相機(jī)、慣性和電磁傳感器����。多種運(yùn)動(dòng)學(xué)技術(shù)可以組合成一個(gè)實(shí)時(shí)混合運(yùn)動(dòng)捕捉系統(tǒng),以同時(shí)利用每種技術(shù)的優(yōu)勢(shì)��。
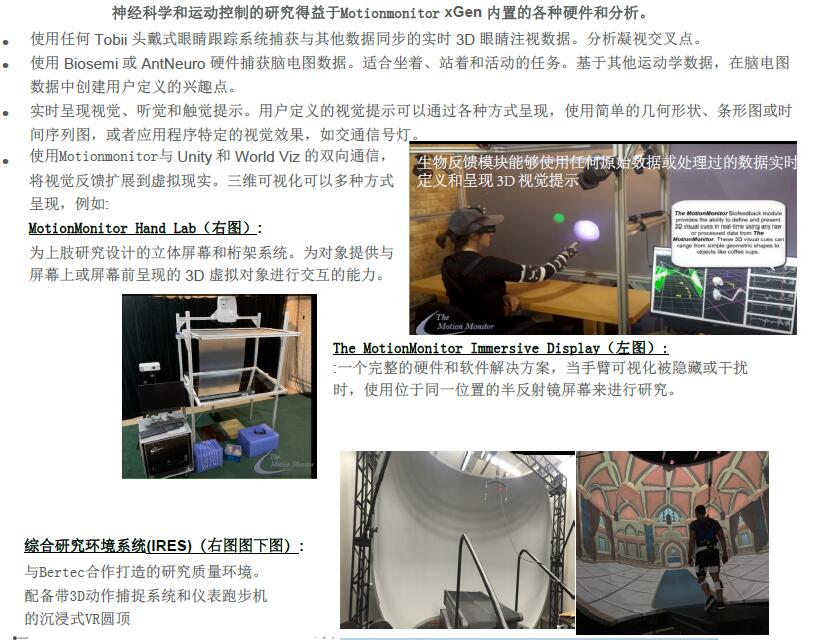
二����、神經(jīng)科學(xué)與運(yùn)動(dòng)控制
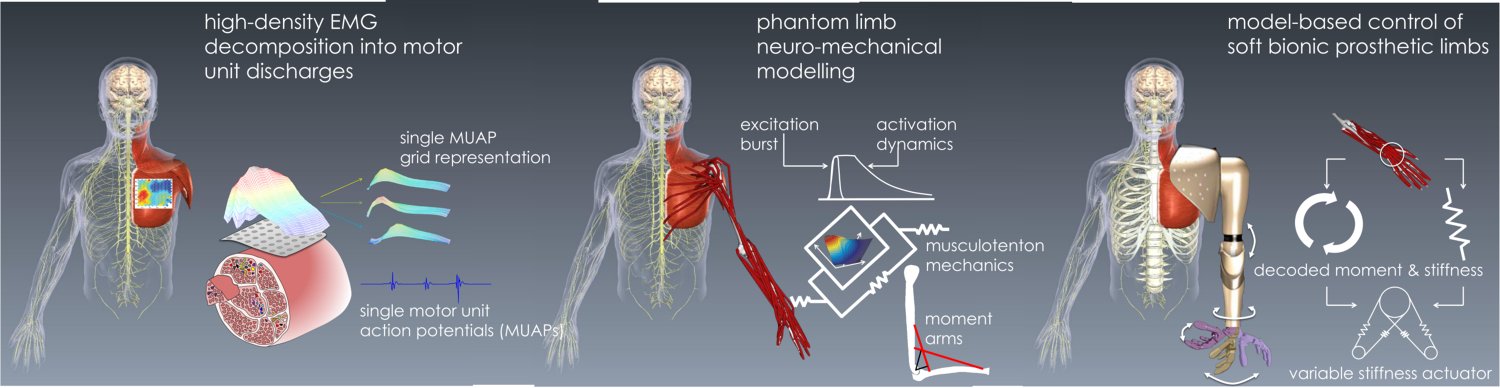
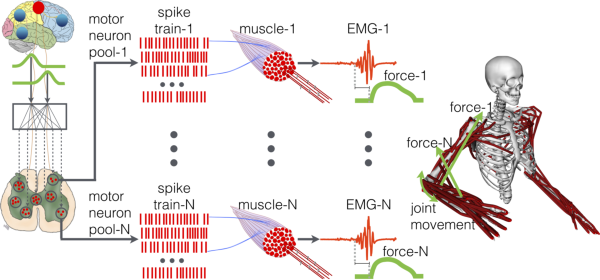
人體運(yùn)動(dòng)源于神經(jīng)���、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動(dòng)��。盡管了解運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制����,但目前還沒有對(duì)復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用的相關(guān)實(shí)驗(yàn)理解。這是理解人類運(yùn)動(dòng)的主要挑戰(zhàn)��。
為了解決這個(gè)問題����,MotionMonitor開發(fā)了綜合多尺度建模平臺(tái),包括肌肉�����、骨骼和神經(jīng)模型等等����。我們使用**的高密度肌電圖 (HD-EMG) 與盲源分離相結(jié)合,將干擾 HD-EMG 信號(hào)識(shí)別到由同時(shí)控制許多肌肉纖維的脊髓運(yùn)動(dòng)神經(jīng)元放電的尖峰列車集合中�。我們開發(fā)了由體內(nèi)運(yùn)動(dòng)神經(jīng)元放電驅(qū)動(dòng)的多尺度肌肉骨骼建模公式,用于計(jì)算所得肌肉骨骼力的高保真估計(jì)�。這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力qian所未有,因此將為了解神經(jīng)肌肉/骨科ji病的病因���、診斷和治liao開辟新的途徑��。
身體全部動(dòng)作運(yùn)動(dòng)獲取分析系統(tǒng),全身體動(dòng)作運(yùn)動(dòng)收集分析系統(tǒng),Xsens慣性測(cè)量單元同步數(shù)據(jù)采集分析系,人身動(dòng)作運(yùn)動(dòng)捕捉跟蹤分析系統(tǒng),人體運(yùn)動(dòng)動(dòng)作綜合捕捉分析系統(tǒng),人體動(dòng)作運(yùn)動(dòng)捕獲分析系統(tǒng),運(yùn)動(dòng)分析測(cè)試分析系統(tǒng),肌肉建模系統(tǒng),主題骨骼幾何形狀3D渲染系統(tǒng),3D動(dòng)作捕捉系統(tǒng)數(shù)據(jù)互通整合
三��、康復(fù)與人體工程學(xué):
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持,
l 電磁式
利用磁場(chǎng)的強(qiáng)度進(jìn)行位置和方位跟蹤���。一般包括發(fā)射器��、接收器����、接口和計(jì)算機(jī)�����。優(yōu)點(diǎn)是不存在遮擋問題�,接收器與發(fā)射器之間允許有其他物體,也就允許用戶走動(dòng)��。相對(duì)于其他運(yùn)動(dòng)捕捉設(shè)備��,它的價(jià)格較低��、精度適中����、采樣率高(可達(dá)120次/秒)、工作范圍大(可達(dá)60m2)��,允許多個(gè)磁跟蹤器跟蹤整個(gè)身體運(yùn)動(dòng)�,并且增加了跟蹤運(yùn)動(dòng)的范圍。缺點(diǎn)是易受電子設(shè)備����、鐵磁場(chǎng)材料的干擾,可能導(dǎo)致磁場(chǎng)變形引起誤差����。測(cè)量距離加大時(shí)誤差增加,時(shí)間延遲交大(33ms)��,有小的抖動(dòng)����。
通過盲推得出被跟蹤物體的位置,也就是說完全通過運(yùn)動(dòng)系統(tǒng)內(nèi)部的推算���。優(yōu)點(diǎn)是不存在發(fā)射源�、不怕遮擋�����、沒有外界干擾,有無限大的工作空間�����。缺點(diǎn)是快速積累誤差����。